Detailed Secondary Frequency Regulation Study#
In this case, we will show how to use AMS and ANDES to mimic the system secondary frequency regulation, where system automatic generation control (AGC) is used to maintain the system frequency at the nominal value.
References:
Wang et al., “Electric Vehicles Charging Time Constrained Deliverable Provision of Secondary Frequency Regulation,” in IEEE Transactions on Smart Grid, vol. 15, no. 4, pp. 3892-3903, July 2024, doi: 10.1109/TSG.2024.3356948.
NERC, “Standard BAL-001-2 – Real Power Balancing Control Performance,” https://www.nerc.com/pa/Stand/Reliability%20Standards/BAL-001-2.pdf
[1]:
from itertools import chain
import numpy as np
import scipy
import pandas as pd
import ams
import andes
import matplotlib
import matplotlib.pyplot as plt
Reset matplotlib style to default.
[2]:
matplotlib.rcdefaults()
Ensure in-line plots.
[3]:
%matplotlib inline
[4]:
andes.config_logger(stream_level=40)
[5]:
ams.config_logger(stream_level=30)
Dispatch case#
We use the IEEE 39-bus system as an example.
[6]:
sp = ams.load(ams.get_case('ieee39/ieee39_uced.xlsx'),
setup=True,
no_output=True,)
In RTED documentation, we can see that Var rgu and rgd are the variables for RegUp/Dn reserve, and Constraint rbu and rbd are the equality constraints for RegUp/Dn reserve balance.
As for the RegUp/Dn reserve requirements, it is defined by parameter du and dd as percentage of the total load, and later dud and ddd are the actual reserve requirements.
[7]:
sp.RTED.dud.v
[7]:
array([2.34256, 0. ])
[8]:
sp.RTED.du.v
[8]:
array([0.05, 0.05])
Dynamic case#
[9]:
sa = sp.to_andes(addfile=andes.get_case('ieee39/ieee39_full.xlsx'),
setup=True,
no_output=True,
default_config=True,
)
Generating code for 1 models on 12 processes.
Following PFlow models in addfile will be overwritten: <Bus>, <PQ>, <PV>, <Slack>, <Shunt>, <Line>, <Area>
AMS system 0x3327aeb10 is linked to the ANDES system 0x33274ede0.
Device ACEc is used to calculate the Area Control Error (ACE).
[10]:
sa.ACEc.as_df()
[10]:
| idx | u | name | bus | bias | busf | |
|---|---|---|---|---|---|---|
| uid | ||||||
| 0 | 1 | 1.0 | ACE_1 | 1 | 300.0 | BusFreq_2 |
Synthetic load#
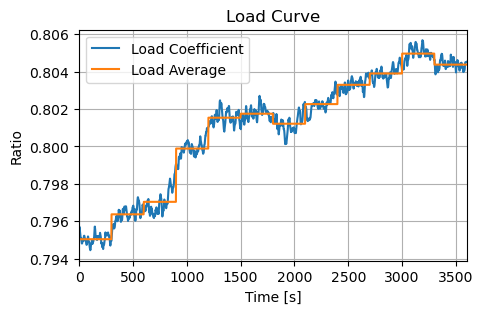
ISO-NE provides various grid data, such as Five-Minute System Demand. In this example, we revise the March 02, 2024, 18 PM data.
[11]:
load_isone = np.array([
11920.071, 11980.979, 12000.579, 12145.243, 12211.862, 12220.703,
12191.051, 12241.546, 12285.719, 12312.626, 12364.102, 12336.354
])
# Normalize the load
load_min = load_isone.min()
load_max = load_isone.max()
load_mid = (load_max + load_min) / 2 # Midpoint of the range
# Set to desired range
load_range = 0.8 + 0.01 * ((load_isone - load_mid) / (load_max - load_min))
load_scale_base = np.repeat(load_range, 300)
# smooth load_scale_base
load_scale_smooth = scipy.signal.savgol_filter(load_scale_base, 600, 4)
np.random.seed(2024) # Set random seed for reproducibility
random_bias = np.random.normal(loc=0, scale=0.0015,
size=len(load_scale_smooth))
random_smooth = scipy.signal.savgol_filter(random_bias, 20, 1)
# Add noise to the load as random ACE
load_coeff_base = load_scale_smooth + random_smooth
# smooth
load_coeff = scipy.signal.savgol_filter(load_coeff_base, 10, 2)
# NOTE: force the first 2 points to be the same as first interval average
load_coeff[0:2] = load_coeff[0:300].mean()
# average load every N points, for RTED dispatch
load_coeff_avg = load_coeff.reshape(-1, 300).mean(axis=1)
load_coeff_avg = np.repeat(load_coeff_avg, 300)
fig_load, ax_load = plt.subplots(figsize=(5, 3), dpi=100)
ax_load.plot(range(len(load_coeff)), load_coeff,
label='Load Coefficient')
ax_load.plot(range(len(load_coeff_avg)), load_coeff_avg,
label='Load Average')
ax_load.set_xlim([0, 3600])
ax_load.set_xlabel('Time [s]')
ax_load.set_ylabel('Ratio')
ax_load.set_title('Load Curve')
ax_load.grid(True)
ax_load.legend()
[11]:
<matplotlib.legend.Legend at 0x334cff350>
Co-simulation#
Define constants#
Here we assume the AGC interval is 4 seconds, and RTED interval is 300 seconds.
Between the interoperation of AMS and ANDES, there is a AC conversion step to convert the DC-based dispatch resutls to AC-based power flow results. For more details, check the reference paper and AMS source code - dc2ac.
AGC controller#
Since there is not an built-in AGC controller in ANDES, we can define a PI controller to calculate the control signal for the AGC:
AGC_raw = kp * ACE + ki * integral(ACE)
Note that, in the AGC interval, there is a cap operation to limit the AGC signal within procured reserve limits.
ANDES settings#
ANDES load needs to be set to constant load for effective load change.
[12]:
# --- time constants ---
total_time = 610
RTED_interval = 300
AGC_interval = 4
id_rted = -1 # RTED interval counter
id_agc = -1 # AGC interval counter
# --- AGC controller ---
kp = 0.1
ki = 0.05
ACE_integral = 0
ACE_raw = 0
# --- initialize output ---
# pd_andes: total load in ANDES
# pd_ams: total load in AMS; pg_ams: total generation in AMS
# pru_ams: total RegUp in AMS; prd_ams: total RegDn in AMS
out_cols = ['time', 'freq', 'ACE', 'AGC',
'pd_andes', 'pd_ams', 'pg_ams',
'pru_ams', 'prd_ams']
outdf = pd.DataFrame(data=np.zeros((total_time, len(out_cols))),
columns=out_cols)
# --- AMS settings ---
sp.SFR.set(src='du', idx=sp.SFR.idx.v, attr='v', value=0.0015*np.ones(sp.SFR.n))
sp.SFR.set(src='dd', idx=sp.SFR.idx.v, attr='v', value=0.0015*np.ones(sp.SFR.n))
# --- ANDES settings ---
sa.TDS.config.no_tqdm = True # turn off ANDES progress bar
sa.TDS.config.criteria = 0 # turn off ANDES criteria check
# adjsut ANDES TDS settings to save memory
sa.TDS.config.save_every = 0
# adjust dynamic parameters
# NOTE: might run into error if there exists a TurbineGov model that does not have "VMAX"
tbgov_src = [mdl.idx.v for mdl in sa.TurbineGov.models.values()]
tbgov_idx = list(chain.from_iterable(tbgov_src))
sa.TurbineGov.set(src='VMAX', idx=tbgov_idx, attr='v',
value=9999 * np.ones(sa.TurbineGov.n),)
sa.TurbineGov.set(src='VMIN', idx=tbgov_idx, attr='v',
value=np.zeros(sa.TurbineGov.n),)
syg_src = [mdl.idx.v for mdl in sa.SynGen.models.values()]
syg_idx = list(chain.from_iterable(syg_src))
sa.SynGen.set(src='ra', idx=syg_idx, attr='v',
value=np.zeros(sa.SynGen.n),)
# use constant power model for PQ
sa.PQ.config.p2p = 1
sa.PQ.config.q2q = 1
sa.PQ.config.p2z = 0
sa.PQ.config.q2z = 0
sa.PQ.pq2z = 0
# save the initial load values
p0_sp = sp.PQ.p0.v.copy()
q0_sp = sp.PQ.q0.v.copy()
p0_sa = sa.PQ.p0.v.copy()
q0_sa = sa.PQ.q0.v.copy()
# --- Co-Sim Variables ---
# save device index
pq_idx = sp.PQ.idx.v # PQ index
# get a copy of link table to calculate AGC power
# pd.set_option('future.no_silent_downcasting', True) # pandas setting
maptab = sp.dyn.link.copy().fillna(False)
# existence of each type of generator
maptab['has_gov'] = maptab['gov_idx'].fillna(0, inplace=False).astype(bool).astype(int)
maptab['has_dg'] = maptab['dg_idx'].fillna(0, inplace=False).astype(bool).astype(int)
maptab['has_rg'] = maptab['rg_idx'].fillna(0, inplace=False).astype(bool).astype(int)
# initialize columns for power output
# pg: StaticGen power reference; pru: RegUp power; prd: RegDn power
# pgov: TurbineGov power; prg: RenGen power; pdg: DG power
# bu: RegUp participation factor; bd: RegDown participation factor
# agov: TurbineGov AGC power; adg: DG AGC power; arg: RenGen AGC power
add_cols = ['pg', 'pru', 'prd', 'pgov',
'prg', 'pdg', 'bu', 'bd',
'agov', 'adg', 'arg']
maptab[add_cols] = 0
# output data of each unit's AGC power
# aout: delivered AGC power; aref: AGC reference
agc_cols = list(maptab['stg_idx'])
agc_ref = pd.DataFrame(data=np.zeros((total_time, len(list(['time']) + agc_cols))),
columns=list(['time']) + agc_cols)
agc_out = pd.DataFrame(data=np.zeros((total_time, len(list(['time']) + agc_cols))),
columns=list(['time']) + agc_cols)
# output data of each dispatch interval's results
gen_cols = list(maptab['stg_idx'])
n_dispatch = np.ceil(total_time / RTED_interval).astype(int)
pg_ref = pd.DataFrame(data=np.zeros((n_dispatch, len(list(['n_rted']) + gen_cols))),
columns=list(['n_rted']) + gen_cols)
pru_ref = pd.DataFrame(data=np.zeros((n_dispatch, len(list(['n_rted']) + gen_cols))),
columns=list(['n_rted']) + gen_cols)
prd_ref = pd.DataFrame(data=np.zeros((n_dispatch, len(list(['n_rted']) + gen_cols))),
columns=list(['n_rted']) + gen_cols)
/var/folders/__/n5kx_m_s0tbg6n5qd7rh51700000gn/T/ipykernel_34212/3863718312.py:70: FutureWarning: Downcasting object dtype arrays on .fillna, .ffill, .bfill is deprecated and will change in a future version. Call result.infer_objects(copy=False) instead. To opt-in to the future behavior, set `pd.set_option('future.no_silent_downcasting', True)`
maptab = sp.dyn.link.copy().fillna(False)
Main loop#
[13]:
for t in range(0, total_time, 1):
# --- Wathdog ---
if (t % 200 == 0) and (t > 0):
print(f"--Watchdog: t={t} sec.")
# --- Dispatch interval ---
if t % RTED_interval == 0:
id_rted += 1 # update RTED interval counter
id_agc = -1 # reset AGC interval counter
print(f"====== RTED Interval <{id_rted}> ======")
# use 5-min average load in dispatch solution
load_avg = load_coeff[t:t+RTED_interval].mean()
# set load in to AMS
sp.PQ.set(src='p0', idx=pq_idx, attr='v', value=load_avg * p0_sp)
sp.PQ.set(src='q0', idx=pq_idx, attr='v', value=load_avg * q0_sp)
print(f"--AMS: update disaptch load with factor {load_avg:.6f}.")
# get dynamic generator output from TDS
if t > 0:
_receive = sp.dyn.receive(adsys=sa, routine='RTED', no_update=True)
if _receive:
print("--AMS: received data from ANDES.")
# update RTED parameters
sp.RTED.update()
# run RTED
sp.RTED.run(solver='CLARABEL')
# convert to AC
flag_2ac = sp.RTED.dc2ac(kloss=1.02 if id_rted == 0 else 1)
if flag_2ac:
print(f"--AMS: AC conversion successful.")
else:
print(f"ERROR! AC conversion failed!")
break
if sp.RTED.exit_code == 0:
print(f"--AMS: {sp.recent.class_name} optimized.")
# update in mapping table
maptab['pg'] = sp.RTED.get(src='pg', attr='v', idx=maptab['stg_idx'])
maptab['pru'] = sp.RTED.get(src='pru', attr='v', idx=maptab['stg_idx'])
maptab['prd'] = sp.RTED.get(src='prd', attr='v', idx=maptab['stg_idx'])
maptab['bu'] = maptab['pru'] / maptab['pru'].sum()
maptab['bd'] = maptab['prd'] / maptab['prd'].sum()
# calculate power reference for dynamic generator
maptab['pgov'] = maptab['pg'] * maptab['has_gov'] * maptab['gammap']
maptab['pdg'] = maptab['pg'] * maptab['has_dg'] * maptab['gammap']
maptab['prg'] = maptab['pg'] * maptab['has_rg'] * maptab['gammap']
# set into governor, Exclude NaN values for governor index
gov_to_set = {gov: pgov for gov, pgov in zip(maptab['gov_idx'], maptab['pgov']) if bool(gov)}
sa.TurbineGov.set(src='pref0', idx=list(gov_to_set.keys()), attr='v', value=list(gov_to_set.values()))
print(f"--ANDES: update TurbineGov reference.")
# set into dg, Exclude NaN values for dg index
dg_to_set = {dg: pdg for dg, pdg in zip(maptab['dg_idx'], maptab['pdg']) if bool(dg)}
sa.DG.set(src='pref0', idx=list(dg_to_set.keys()), attr='v', value=list(dg_to_set.values()))
print(f"--ANDES: update DG reference.")
# set into rg, Exclude NaN values for rg index
rg_to_set = {rg: prg for rg, prg in zip(maptab['rg_idx'], maptab['prg']) if bool(rg)}
sa.RenGen.set(src='Pref', idx=list(rg_to_set.keys()), attr='v', value=list(rg_to_set.values()))
print(f"--ANDES: update RenGen reference.")
# record dispatch data
pg_ref.loc[id_rted, 'n_rted'] = id_rted
pg_ref.loc[id_rted, gen_cols] = maptab['pg'].values
pru_ref.loc[id_rted, 'n_rted'] = id_rted
pru_ref.loc[id_rted, gen_cols] = maptab['pru'].values
prd_ref.loc[id_rted, 'n_rted'] = id_rted
prd_ref.loc[id_rted, gen_cols] = maptab['prd'].values
else:
print(f"ERROR! {sp.recent.class_name} failed: {sp.RTED.om.prob.status}")
break
# --- AGC interval ---
if t % AGC_interval == 0:
id_agc += 1 # update AGC interval counter
# cap ACE_raw with procured capacity as AGC response
if ACE_raw >= 0: # RegUp
ACE_input = min([ACE_raw, maptab['pru'].sum()])
b_factor = maptab['bu']
else: # RegDn
ACE_input = -min([-ACE_raw, maptab['prd'].sum()])
b_factor = maptab['bd']
outdf.loc[t:t+AGC_interval, 'AGC'] = ACE_input
maptab['agov'] = ACE_input * b_factor * maptab['has_gov'] * maptab['gammap']
maptab['adg'] = ACE_input * b_factor * maptab['has_dg'] * maptab['gammap']
maptab['arg'] = ACE_input * b_factor * maptab['has_rg'] * maptab['gammap']
# set into governor, Exclude NaN values for governor index
agov_to_set = {gov: agov for gov, agov in zip(maptab['gov_idx'], maptab['agov']) if bool(gov)}
sa.TurbineGov.set(src='paux0', idx=list(agov_to_set.keys()), attr='v', value=list(agov_to_set.values()))
# set into dg, Exclude NaN values for dg index
adg_to_set = {dg: adg for dg, adg in zip(maptab['dg_idx'], maptab['adg']) if bool(dg)}
sa.DG.set(src='Pext0', idx=list(adg_to_set.keys()), attr='v', value=list(adg_to_set.values()))
# set into rg, Exclude NaN values for rg index
arg_to_set = {rg: arg + prg for rg, arg,
prg in zip(maptab['rg_idx'], maptab['arg'], maptab['prg']) if bool(rg)}
sa.RenGen.set(src='Pref', idx=list(arg_to_set.keys()), attr='v', value=list(arg_to_set.values()))
# --- TDS interval ---
if t > 0: # --- run TDS ---
# set laod into PQ.Ppf and PQ.Qpf
sa.PQ.set(src='Ppf', idx=pq_idx, attr='v', value=load_coeff[t] * p0_sa)
sa.PQ.set(src='Qpf', idx=pq_idx, attr='v', value=load_coeff[t] * q0_sa)
sa.TDS.config.tf = t
sa.TDS.run()
# Update AGC PI controller
ACE_raw = -(kp * sa.ACEc.ace.v.sum() + ki * ACE_integral)
ACE_integral = ACE_integral + sa.ACEc.ace.v.sum()
# record AGC data
# agc reference
agc_ref.loc[t, 'time'] = t
agc_ref.loc[t, agc_cols] = maptab[['agov', 'adg', 'arg']].sum(axis=1).values
# delivered AGC power
sp.dyn.receive(adsys=sa, routine='RTED', no_update=True)
pout = sp.recent.get(src='pg0', attr='v', idx=maptab['stg_idx'])
pref = sp.recent.get(src='pg', attr='v', idx=maptab['stg_idx'])
# agc output is the difference between output power and scheduled power
agc_out.loc[t, 'time'] = t
agc_out.loc[t, agc_cols] = pout - pref
# check if to continue
if sa.exit_code != 0:
print(f"ERROR! t={t}, TDS error: {sa.exit_code}")
break
else: # --- init TDS ---
# set pg to StaticGen.p0
sa.StaticGen.set(src='p0', idx=sp.RTED.pg.get_all_idxes(), attr='v', value=sp.RTED.pg.v)
# set Bus.v to StaticGen.v
bus_stg = sp.StaticGen.get(src='bus', attr='v', idx=sp.StaticGen.get_all_idxes())
v_stg = sp.Bus.get(src='v', attr='v', idx=bus_stg)
sa.StaticGen.set(src='v0', idx=sp.StaticGen.get_all_idxes(), attr='v', value=v_stg)
# set vBus to Bus
sa.Bus.set(src='v0', idx=sp.RTED.vBus.get_all_idxes(), attr='v', value=sp.RTED.vBus.v)
# set load into PQ.p0 and PQ.q0
sa.PQ.set(src='p0', idx=pq_idx, attr='v', value=load_coeff[t] * p0_sa)
sa.PQ.set(src='q0', idx=pq_idx, attr='v', value=load_coeff[t] * q0_sa)
sa.PFlow.run() # run power flow
sa.TDS.init() # initialize TDS
if sa.exit_code != 0:
print(f"ERROR! t={t}, TDS init error: {sa.exit_code}")
break
print(f"--ANDES: TDS initialized.")
# --- record output ---
outdf.loc[t, 'time'] = t
outdf.loc[t, 'freq'] = sa.BusFreq.f.v[1]
outdf.loc[t, 'ACE'] = sa.ACEc.ace.v.sum()
outdf.loc[t, 'pd_andes'] = sa.PQ.Ppf.v.sum()
outdf.loc[t, 'pd_ams'] = sp.RTED.pd.v.sum()
outdf.loc[t, 'pg_ams'] = sp.RTED.pg.v.sum()
outdf.loc[t, 'pru_ams'] = sp.RTED.pru.v.sum()
outdf.loc[t, 'prd_ams'] = sp.RTED.prd.v.sum()
# crop the output with valid time
if t < total_time - 1: # end early, means some error happened
outdf = outdf[0:t-1]
Building system matrices
Parsing OModel for <RTED>
Evaluating OModel for <RTED>
Finalizing OModel for <RTED>
<RTED> solved as optimal in 0.0119 seconds, converged in 10 iterations with CLARABEL.
Parsing OModel for <ACOPF>
Evaluating OModel for <ACOPF>
Finalizing OModel for <ACOPF>
====== RTED Interval <0> ======
--AMS: update disaptch load with factor 0.795040.
<ACOPF> solved in 0.2337 seconds, converged in 24 iterations with PYPOWER-PIPS.
<RTED> converted to AC.
--AMS: AC conversion successful.
--AMS: RTED optimized.
--ANDES: update TurbineGov reference.
--ANDES: update DG reference.
--ANDES: update RenGen reference.
--ANDES: TDS initialized.
--Watchdog: t=200 sec.
Building system matrices
<RTED> reinit OModel due to non-parametric change.
Evaluating OModel for <RTED>
Finalizing OModel for <RTED>
<RTED> solved as optimal in 0.0118 seconds, converged in 10 iterations with CLARABEL.
====== RTED Interval <1> ======
--AMS: update disaptch load with factor 0.796370.
--AMS: received data from ANDES.
<ACOPF> solved in 0.2808 seconds, converged in 30 iterations with PYPOWER-PIPS.
<RTED> converted to AC.
--AMS: AC conversion successful.
--AMS: RTED optimized.
--ANDES: update TurbineGov reference.
--ANDES: update DG reference.
--ANDES: update RenGen reference.
--Watchdog: t=400 sec.
Building system matrices
<RTED> reinit OModel due to non-parametric change.
Evaluating OModel for <RTED>
Finalizing OModel for <RTED>
<RTED> solved as optimal in 0.0119 seconds, converged in 10 iterations with CLARABEL.
--Watchdog: t=600 sec.
====== RTED Interval <2> ======
--AMS: update disaptch load with factor 0.797038.
--AMS: received data from ANDES.
<ACOPF> solved in 0.3197 seconds, converged in 34 iterations with PYPOWER-PIPS.
<RTED> converted to AC.
--AMS: AC conversion successful.
--AMS: RTED optimized.
--ANDES: update TurbineGov reference.
--ANDES: update DG reference.
--ANDES: update RenGen reference.
Results#
Data processing#
Scale to nominal value
[14]:
outdf_plt = outdf.copy()
agc_out_plt = agc_out.copy()
agc_ref_plt = agc_ref.copy()
pg_ref_plt = pg_ref.copy()
pru_ref_plt = pru_ref.copy()
prd_ref_plt = prd_ref.copy()
# scale to nominal values
outdf_plt['freq'] *= sa.config.freq
mva_cols = ['pd_andes', 'pd_ams', 'pg_ams',
'pru_ams', 'prd_ams',
'ACE', 'AGC']
outdf_plt['prd_ams'] *= -1
outdf_plt[mva_cols] *= sa.config.mva
agc_out_plt[agc_cols] *= sa.config.mva
agc_ref_plt[agc_cols] *= sa.config.mva
pg_ref_plt[gen_cols] *= sa.config.mva
pru_ref_plt[gen_cols] *= sa.config.mva
prd_ref_plt[gen_cols] *= sa.config.mva
# calculate frequency deviation
outdf_plt['fd'] = outdf_plt['freq'] - sa.config.freq
Dispatch results
[15]:
print('Dispatch generation')
print(pg_ref_plt)
print('Dispatch RegUp')
print(pru_ref_plt)
print('Dispatch RegDn')
print(prd_ref_plt)
Dispatch generation
n_rted Slack_39 PV_38 PV_37 PV_36 PV_35 \
0 0.0 386.970702 383.193201 380.621217 380.820996 382.533818
1 1.0 379.935352 376.269537 373.771156 373.934512 375.594240
2 2.0 380.257507 376.586537 374.084835 374.249842 375.911982
PV_34 PV_33 PV_32 PV_31 PV_30
0 367.937512 379.728940 385.417787 387.455488 385.588320
1 361.574196 372.866231 378.381743 380.365045 378.582243
2 361.865859 373.180473 378.703844 380.689629 378.903045
Dispatch RegUp
n_rted Slack_39 PV_38 PV_37 PV_36 PV_35 PV_34 \
0 0.0 1.287971 0.825139 0.442992 0.267389 0.574634 0.266773
1 1.0 1.297501 0.836450 0.441245 0.263458 0.576924 0.263087
2 2.0 1.295520 0.837502 0.441919 0.264108 0.577644 0.263742
PV_33 PV_32 PV_31 PV_30
0 0.267681 0.442814 0.513461 0.698435
1 0.263505 0.441893 0.513794 0.698779
2 0.264153 0.442587 0.514523 0.699629
Dispatch RegDn
n_rted Slack_39 PV_38 PV_37 PV_36 PV_35 PV_34 \
0 0.0 1.061255 0.886641 0.453684 0.265824 0.633451 0.258944
1 1.0 1.068877 0.876098 0.477181 0.262271 0.627822 0.260922
2 2.0 1.077700 0.874332 0.476962 0.262233 0.627325 0.260933
PV_33 PV_32 PV_31 PV_30
0 0.272305 0.479759 0.546196 0.729230
1 0.262731 0.467584 0.542867 0.750283
2 0.262696 0.467352 0.542516 0.749276
AGC mileage in MWh
[16]:
agc_row_index = np.arange(0, total_time, AGC_interval)
agc_mileage = agc_out_plt.loc[agc_row_index, agc_cols].diff().abs().sum(axis=0) * AGC_interval / 3600
print(f"AGC milage in MWh:\n{agc_mileage}")
AGC milage in MWh:
Slack_39 0.192374
PV_38 0.018822
PV_37 0.014038
PV_36 0.013970
PV_35 0.014016
PV_34 0.012151
PV_33 0.015037
PV_32 0.013776
PV_31 0.014142
PV_30 0.014817
dtype: float64
CPS1 score
Following adjustments are made to calculate the CPS1 score:
eps is the constant derived from a targeted frequency bound, where we use the average frequency deviation as the reference
The \(CF_{clock-minute}\) is used when calcualting \(CF\) rather than \(CF_{12-month}\)
[17]:
def cm_avg(x):
"""
Clock minute average
Parameters
----------
x : pd.Series
Input time series, index is time in seconds.
Returns
-------
float
Clock minute average of the time series.
"""
return np.sum(x) / len(x)
eps = outdf_plt['fd'].mean()
bias = sa.ACEc.bias.v[0]
df_cm = cm_avg(outdf_plt['fd'])
ace_cm = cm_avg(outdf_plt['ACE'] / (10 * bias))
cf_cm = df_cm * ace_cm
cf = cf_cm / np.square(eps)
cps1 = (2 - cf) * 100
print(f"CPS1 score: {cps1}")
CPS1 score: 100.00360717514486
Plot#
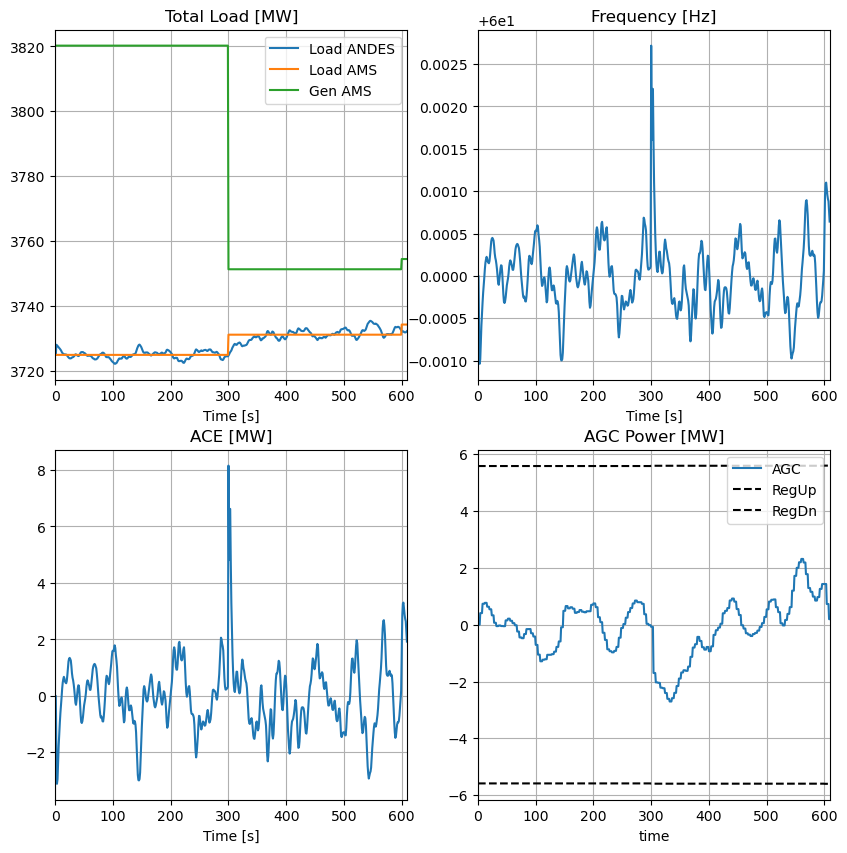
System dynamics
[18]:
fig, ax = plt.subplots(2, 2, figsize=(10, 10), dpi=100)
outdf_plt.plot(x='time', y='pd_andes', ax=ax[0, 0],
title='Total Load [MW]',
xlim=[0, total_time],
legend=True, label='Load ANDES')
outdf_plt.plot(x='time', y='pd_ams', ax=ax[0, 0],
legend=True, label='Load AMS')
outdf_plt.plot(x='time', y='pg_ams', ax=ax[0, 0],
grid=True,
legend=True, label='Gen AMS',
xlabel='Time [s]')
outdf_plt.plot(x='time', y='freq', ax=ax[0, 1],
title='Frequency [Hz]', grid=True,
xlim=[0, total_time], legend=False,
xlabel='Time [s]')
outdf_plt.plot(x='time', y='ACE', ax=ax[1, 0],
title='ACE [MW]', grid=True,
xlim=[0, total_time], legend=False,
xlabel='Time [s]')
outdf_plt.plot(x='time', y='AGC', ax=ax[1, 1],
title='AGC Power [MW]',
xlim=[0, total_time],
legend=True, label='AGC',
xlabel='Time [s]')
outdf_plt.plot(x='time', y='pru_ams', ax=ax[1, 1],
legend=True, label='RegUp',
style='--', color='black')
outdf_plt.plot(x='time', y='prd_ams', ax=ax[1, 1],
grid=True,
legend=True, label='RegDn',
style='--', color='black')
ax[1, 1].legend(loc='upper right')
[18]:
<matplotlib.legend.Legend at 0x334ccbbc0>
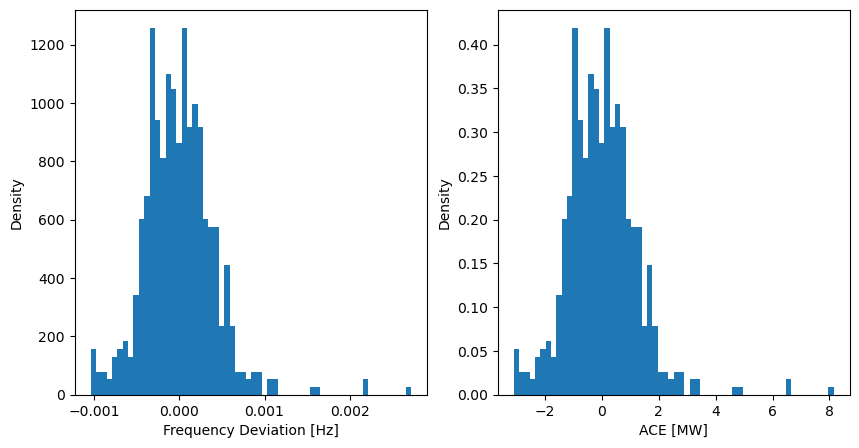
Frequency regulation performance
[19]:
fig_freq, ax_freq = plt.subplots(1, 2, figsize=(10, 5), dpi=100)
outdf_plt.plot(x='time', y='fd', kind='hist', alpha=1, bins=60, density=True,
ax=ax_freq[0], xlabel='Frequency Deviation [Hz]', ylabel='Density',
legend=False)
outdf_plt.plot(x='time', y='ACE', kind='hist', alpha=1, bins=60, density=True,
ax=ax_freq[1], xlabel='ACE [MW]', ylabel='Density',
legend=False)
[19]:
<Axes: xlabel='ACE [MW]', ylabel='Density'>
Settings to Improve Performance#
Long-term dynamic simulation can be memory-consuming, as time-series data is updated by default. To reduce the memory burden, we can configure the TDS with save_every=0, discarding all data immediately after each simulation step. As a trade-off, a separate output array is utilized to store the data, with a resolution matching the co-simulation time step. More details about ANDES settings can be found in the ANDES Release notes -
v1.7.0.
The case has been tested with a complete 3600s duration. However, for demonstration purposes and to conserve CI resources, the simulated time is truncated.
Limitations#
Although the code is designed for generalization, the demo is implemented on the IEEE 39-bus case with generators set to synchronous machines, and its application to other cases is not fully tested.
The load curve is synthetic, based on experience.
Within each interval, generator setpoints are updated only once, without considering smooth action.
In ANDES, certain dynamic parameters are adjusted to facilitate co-simulation, disregarding their actual physical implications.
The used case comprises synchronous generators exclusively, necessitating further adaptation for the inclusion of renewable energy sources.
FAQ#
Q: Why ANDES TDS run into error?
A: Most likely, the error is due to power flow not converging. Possible reasons include: 1) load is too heavy, 2) step change is too large, 3) some devices run into limits.
Q: Why in AMS RTED, load and generation do not exactly match?
A: The RTED is converted using dc2ac, where the generation and bus voltage are adjusted using ACOPF.